









-
功能用途
电铲远程操作系统分为设备本体改造及智能化软件系统����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������两部分。通过为挖掘机加装智控中����� �������Ƴ������������ �������Ƴ������������ �������Ƴ����������� �������Ƴ�������心、各类传感器、通信模块等,使之具备远程遥控����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������功能,并能够在此基础上,����� �������Ƴ����������� �������Ƴ������������ �������Ƴ������������ �������Ƴ�������将机械臂的自动控制技术、自动驾驶的人����� �������Ƴ����������� �������Ƴ������������ �������Ƴ������������ �������Ƴ�������工智能感知技术融合到挖掘����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������机设备的远程操控作业中,从而提高����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������生产效率,保障生产安全。设备本体改造主要分为机械����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������部分、润液部分以及电气自动化部分����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������,通过在不破坏设备本体结构����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������的情况下,选择适配的传感器及友好的安装方式����� �������Ƴ����������� �������Ƴ������������ �������Ƴ������������ �������Ƴ�������,保障整个改装周期短,.����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������..

数智产品中心

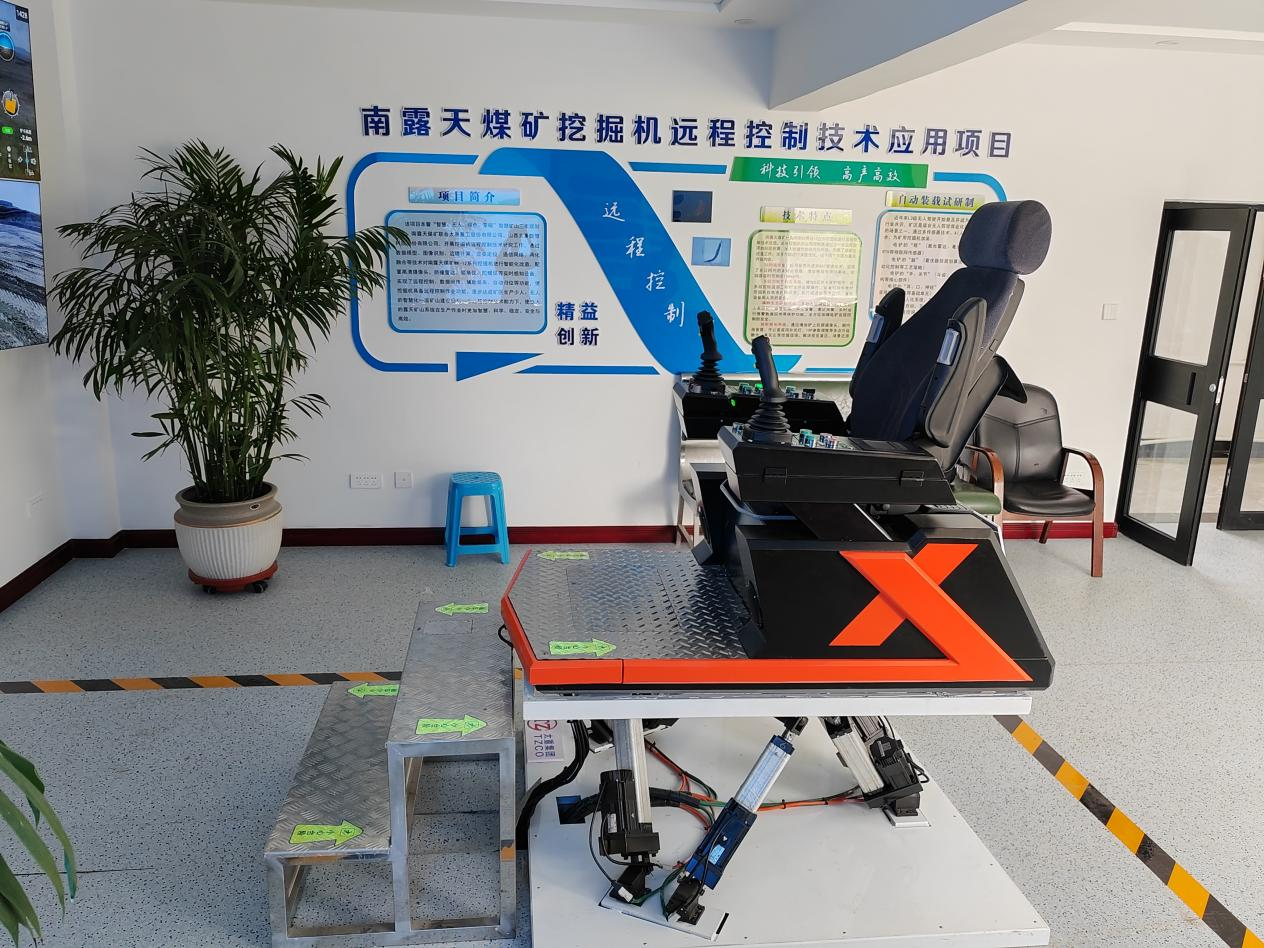
电铲远程操控系统
电铲远程操作系统为我公司智慧化矿����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ������山方向的重要产品之一,该系统集成太重技术中心����� �������Ƴ����������� �������Ƴ������������ �������Ƴ������������ �������Ƴ�������,矿山分公司等多年项目实施经����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ������验,重点结合多个用户现场反馈的使用����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������情况,进行了多个版本的升级和功能的优化补充。目����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������前我公司正在朝着快速实施、大版本升级的方向继续����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������努力钻研。电铲远程操作系统作为智慧矿����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������山、绿色矿山、无人矿山的智能化基础系统平台,集团����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������公司及露天矿用户给予了充分的肯定并期许有更大����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������突破。
优势特色
-
1st
硬件模块化
系统的硬件结构采用模块化的开����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������放式体系搭建。主控模块内含有支持可重����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������构及模块化的嵌入式操作系统,����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������为后续加装智能化功能做准备。采����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������用开放接口、模块化的结构,使得系统未����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������来具有很强的扩展性,便于二次开发和系统����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������维护。
-
2nd
软件模块化
系统采用开放化、模块化的原则����� �������Ƴ����������� �������Ƴ������������ �������Ƴ����������� �������Ƴ�������,来进行软件架构。通过简单的调整便能适应����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ������不同的硬件环境和控制任务,保证����� �������Ƴ����������� �������Ƴ������������ �������Ƴ������������ �������Ƴ�������系统整体具有较高的适应性和����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ������运行效率。
-
3rd
传输标准化
系统采用公共标准的通信协议,完成视频的信令交换����� �������Ƴ������������ �������Ƴ������������ �������Ƴ����������� �������Ƴ�������,以及服务的点对点信号传输。在此基础上,进行多����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ������路信号的分优先级队列传输,即使����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������在网络情况较差的情况下,也能实现高可靠低����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������时延的主路信息传输。可适应5G公网、����� �������Ƴ����������� �������Ƴ������������ �������Ƴ������������ �������Ƴ�������5G私网、4G公网、局域网等各类型网络����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������的传输需求。
-
4th
全方位安全防护
为保障设备使用安全,开发了����� �������Ƴ������������ �������Ƴ������������ �������Ƴ����������� �������Ƴ�������全方位安全防护系统,具体包括:����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������1)信号心跳检测。当通信信号不稳定时、超出阈值时����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������,设备自动强制刹停,不执行后续传回数据,防止设备����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������的动作因网络信号波动,导致执行结果����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ������偏离预期,造成人员财产损失。2)现����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������场遥控急停和远程急停刹车 现场具备更高权限的����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������控制权。同时远程操作者可����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ������在操作台随时强制停止现场设����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ������备,即能够及时处理突发意外,又能����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ������在上下操作台锁住设备,防止误操作,充分保证远程����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������操作的安全性。...
规格参数
| 硬件 | 一比一挖掘机多功能操作台 5G网关 高性能处理工控机 高清低延时摄像头 多种类传感器 |
| 软件 | 信号检测模块 行人识别模块 盲区视频监控模块 运行状态指示灯模块 紧急制动模块 起重臂软着陆模块 智能安全运行反馈模块 铲斗、斗杆位置提示模块 网络延时检测模块 |
| 可选 | 裸眼3D景深感知系统 斗齿识别系统 防碰撞预警系统 多轴运动平台 |
主要业绩
截至到2023年6月,太重集团共完成电����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������铲远程操控系统智能化升级改造项目����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������共计15台/套,服务用户多达12家����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������。
相关解决方案
在线询价
提交您的疑问和需求,我们将在24小时之内����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ������与您联系,请耐心等待,谢����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������谢!
- 销售热线
- 电子邮件
-
867850932@qq.com

在线询价
提交您的疑问和需求,我们将在����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ������24小时之内与您联系,请耐心等待,谢谢!����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������
- 销售热线
- 电子邮件
-
867850932@qq.com